

Sensor and Actuator Integration
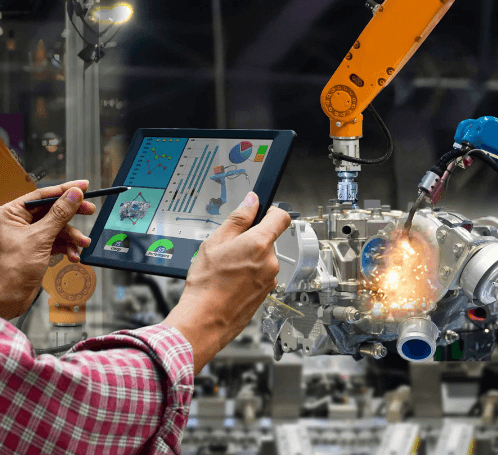
At the heart of modern robotics lies the crucial discipline of sensor and actuator integration. This field forms the foundation of a robot’s ability to perceive its environment and act upon it effectively.
 Sensors
Sensors
Sensors are devices that detect and respond to input from the physical environment. Common sensors in robotics include:
- Cameras for visual input
- LiDAR for distance measurement and mapping
- IMUs (Inertial Measurement Units) for orientation and motion sensing
- Force sensors for detecting contact and pressure
- Microphones for audio input
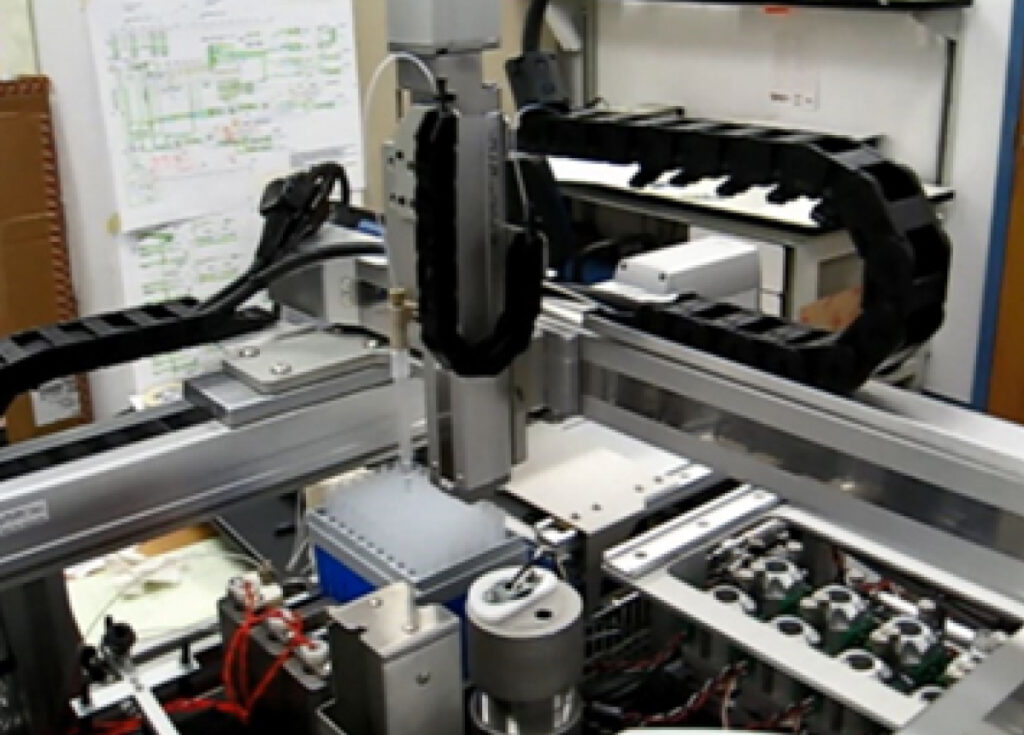
 Actuators
Actuators
Actuators are components that control or move a mechanism. They’re the ‘muscles’ of a robotic system. Common actuators include:
- Electric motors for rotational movement
- Linear actuators for straight-line motion
- Hydraulic and pneumatic systems for high-force applications
- Servos for precise position control
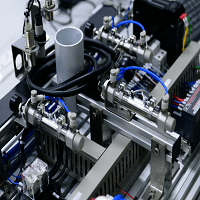
Seamless integration involves not just physically incorporating these components into a robot, but also ensuring they work together harmoniously, processing sensor data to inform actuator movements in real-time.